ROS通信机制(服务通信)
- Service使用 请求-查询式 的通信模型,这样的通信模型没有频繁的消息传递,没有高系统资源的占用,只有接受请求才执行服务,简单而且高效。 2.
Service通信实现的是 一对一 通信,每一个服务由一个节点发起,对这个服务的响应返回同一个节点;Service的信息流是双向的,不…’
- Service使用 请求-查询式 的通信模型,这样的通信模型没有频繁的消息传递,没有高系统资源的占用,只有接受请求才执行服务,简单而且高效。
- Service通信实现的是 一对一 通信,每一个服务由一个节点发起,对这个服务的响应返回同一个节点;Service的信息流是双向的,不仅可以发送消息,同时还会有反馈。所有service包含两部分,Client与Server。
- Service是 同步 通信方式,Client发布请求后会在原地等等reply,直到Server处理完了请求并且完成了reply,Client才会继续执行;Client等待过程中,处于阻塞状态。
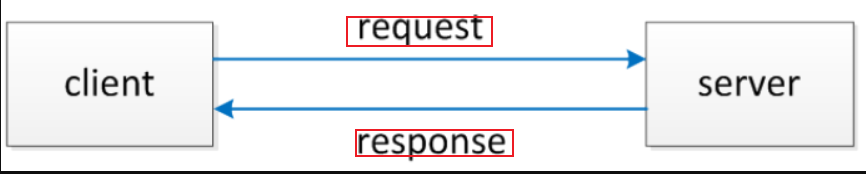
Client Node和Server Node通过request-response的方式进行通信。
服务通信
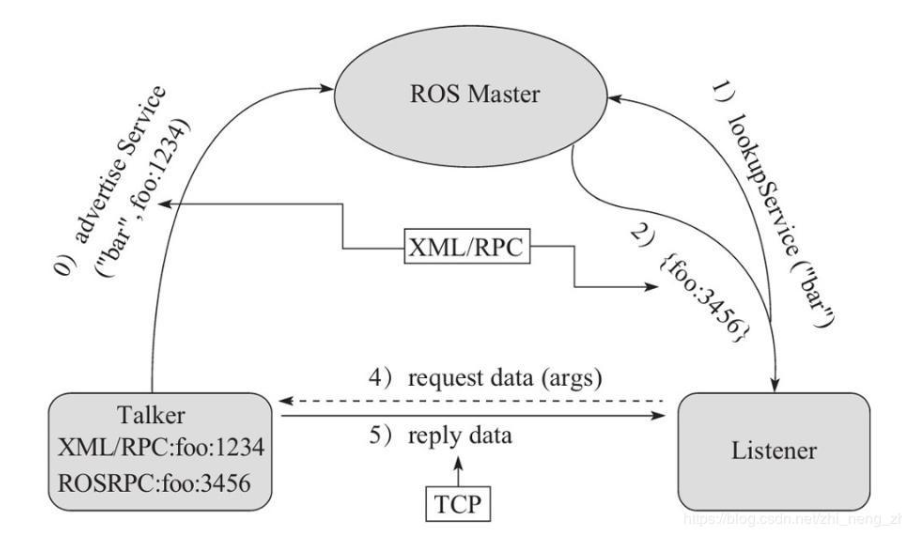
服务通信理论模型
实现步骤0.Server注册
Server 启动后,会通过 RPC 在 ROS Master 中注册自身信息,其中包含提供的服务的名称。 ROS Master 会将节点的注册信息加入到注册表中。
1.Client注册
Client 启动后,也会通过 RPC 在 ROS Master 中注册自身信息,包含需要请求的服务的名称。 ROS Master 会将节点的注册信息加入到注册表中。
2.ROS Master 实现信息匹配
ROS Master 会根据注册表中的信息匹配 Server 和 Client ,并通过 RPC 向 Client 发送 Server 的 TCP 地址信息。
3.Client发送请求
Client 根据步骤2响应的信息,使用 TCP 与 Server 建立网络连接,并发送请求数据。
4.Server发送响应
Server 接收、解析请求的数据,并产生响应结果返回给 Client
服务通信自定义 -srv文件
需求:
服务通信中,客户端提交两个整数至服务端,服务端求和并响应结果到客户端,请创建服务器与客户端通信的数据载体。
流程:
srv 文件内的可用数据类型与 msg 文件一致,且定义 srv 实现流程与自定义 msg 实现流程类似:
①按照固定格式创建 srv 文件
②编辑配置文件
③编译生成中间文件
创建srv文件
- 功能包下创建srv文件夹
- 创建add.srv文件
1 | int32 num1 |
编辑配置文件
package.xml中添加编译依赖与执行依赖
1 | <build_depend>message_generation</build_depend> |
CMakeLists.txt编辑 srv 相关配置
1 | find_package(catkin REQUIRED COMPONENTS |
1 | add_service_files( |
1 | generate_messages( |
编译
C++ 需要调用的中间文件(…/工作空间/devel/include/包名/xxx.h)
Python 需要调用的中间文件(…/工作空间/devel/lib/python3/dist-packages/包名/srv)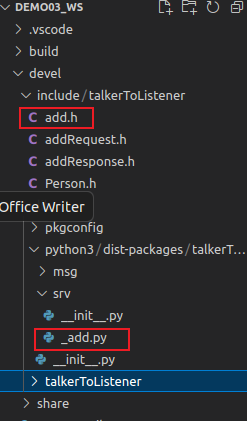
服务通信自定义srv调用(C++)
在模型实现中,ROS master 不需要实现,而连接的建立也已经被封装了,需要关注的关键点有三个:
- 服务端
- 客户端
- 数据
流程:
编写服务端实现;
编写客户端实现;
编辑配置文件;
编译并执行。
服务端
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56/*
需求:
编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器
服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,
客户端再解析
服务器实现:
1.包含头文件
2.初始化 ROS 节点
3.创建 ROS 句柄
4.创建 服务 对象
5.回调函数处理请求并产生响应
6.由于请求有多个,需要调用 ros::spin()
*/
// bool 返回值由于标志是否处理成功
bool doReq(talkerToListener::add::Request& req,
talkerToListener::add::Response& resp){
int num1 = req.num1;
int num2 = req.num2;
ROS_INFO("服务器接收到的请求数据为:num1 = %d, num2 = %d",num1, num2);
//逻辑处理
if (num1 < 0 || num2 < 0)
{
ROS_ERROR("提交的数据异常:数据不可以为负数");
return false;
}
//如果没有异常,那么相加并将结果赋值给 resp
resp.sum = num1 * num2;
return true;
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"AddInts_Server");
// 3.创建 ROS 句柄
ros::NodeHandle nh;
// 4.创建 服务 对象
ros::ServiceServer server = nh.advertiseService("AddInts",doReq);
ROS_INFO("服务已经启动....");
// 5.回调函数处理请求并产生响应
// 6.由于请求有多个,需要调用 ros::spin()
ros::spin();
return 0;
}客户端
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62/*
需求:
编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器
服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,
客户端再解析
服务器实现:
1.包含头文件
2.初始化 ROS 节点
3.创建 ROS 句柄
4.创建 客户端 对象
5.请求服务,接收响应
*/
// 1.包含头文件
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 调用时动态传值,如果通过 launch 的 args 传参,需要传递的参数个数 +3
if (argc != 3)
// if (argc != 5)//launch 传参(0-文件路径 1传入的参数 2传入的参数 3节点名称 4日志路径)
{
ROS_ERROR("请提交两个整数");
return 1;
}
// 2.初始化 ROS 节点
ros::init(argc,argv,"AddInts_Client");
// 3.创建 ROS 句柄
ros::NodeHandle nh;
// 4.创建 客户端 对象
ros::ServiceClient client = nh.serviceClient<talkerToListener::add>("AddInts");
//等待服务启动成功
//方式1
ros::service::waitForService("AddInts");
//方式2
// client.waitForExistence();
// 5.组织请求数据
talkerToListener::add ai;
ai.request.num1 = atoi(argv[1]);
ai.request.num2 = atoi(argv[2]);
// 6.发送请求,返回 bool 值,标记是否成功
bool flag = client.call(ai);
// 7.处理响应
if (flag)
{
ROS_INFO("请求正常处理,响应结果:%d",ai.response.sum);
}
else
{
ROS_ERROR("请求处理失败....");
return 1;
}
return 0;
}配置 CMakeLists.txt
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15add_executable(AddInts_Server src/AddInts_Server.cpp)
add_executable(AddInts_Client src/AddInts_Client.cpp)
add_dependencies(AddInts_Server ${PROJECT_NAME}_gencpp)
add_dependencies(AddInts_Client ${PROJECT_NAME}_gencpp)
target_link_libraries(AddInts_Server
${catkin_LIBRARIES}
)
target_link_libraries(AddInts_Client
${catkin_LIBRARIES}
)执行
服务端


ROS通信机制(服务通信)