VScode运行Ros
ROS是开源的,是用于机器人的一种后操作系统,或者说次级操作系统。 它提供类似操作系统所提供的功能,包含硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间的消息传递、程序发行包管理,它也提供一些工具程序和库用于获取、建立、编写和运行多机整合的程序。 ROS的首要设计目标是在机器人研发领域提高代码复用率。
VScode安装
下载
vscode下载:[网址]:https://code.visualstudio.com/docs?start=true
安装
1、双击安装即可
2、sudo dpkg -i xxxx.deb
卸载
1 | sudo dpkg --purge code |
VScode使用
创建ROS工作空间
1 | mkdir -p xxx_ws/src |
启动VScode
1 | cd xxx_ws |
VScode 编译ros程序
快捷键ctrl+shift+B
选择catkin_make:build
注意这里需要下载几个插件
测试(以C++为例)
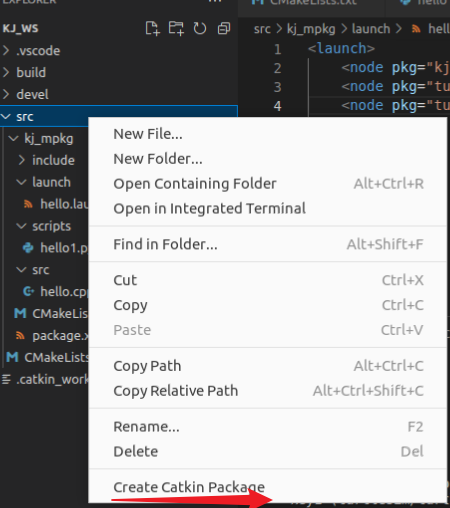
创建功能包
新建源文件
在功能包目录下src中新建xxx.cpp
输入以下代码
1 |
|
配置CmakeLists.txt文件
修改如下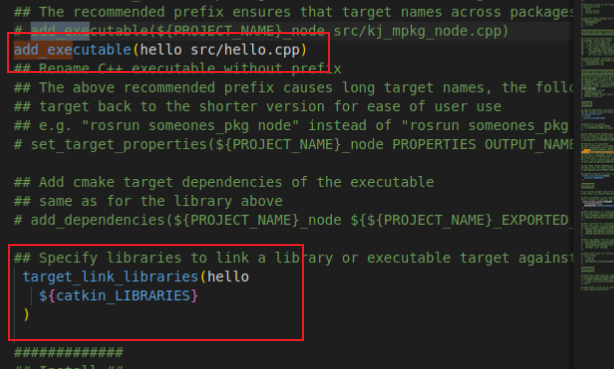
以下是py文件配置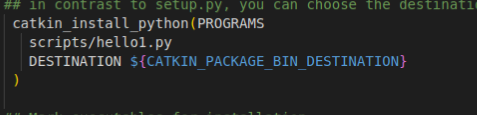
编译执行
+一个终端
再加一个终端
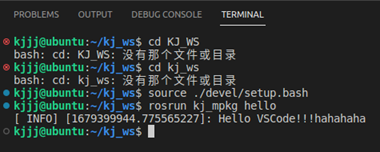
如上编译成功
launch文件实现多个节点编译
创建文件
在功能包下创建launch文件夹
在该文件夹下可创建launch文件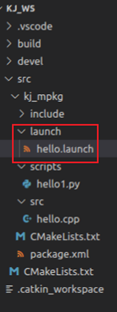
编译launch文件内容
1 | <launch> |
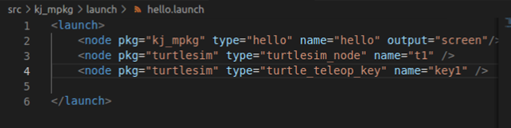
第一个是编写的C++hello节点,第二个是小乌龟测试节点,第三个是鼠标节点。
实现运行多个节点
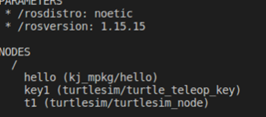
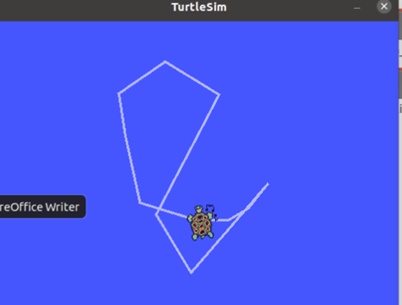
运行成功!